






随着智能网联汽车兴起,激光雷达逐渐成为热门词汇。尽管激光雷达增加了智能汽车感知系统的冗余,但仅有车端的冗余是不够的,前方大车和转角盲区仍然存在,超视距感知能力依然缺位。而激光雷达在V2X中的应用让路端感知冗余大大增强了,通过车路协同,让行车安全和效率提升,这是任何单车无论怎样冗余都达不到的效果。

理论上,车载与路测激光雷达在设计上有不同的考虑,其中车端在垂直方向要兼顾正负视角,而路端的垂直方向向上视角并无意义。另一方面是稳定性,路端需要每天日夜不停地工作,虽然某些方面如振动相比车端受影响小,但总体上路端设备对整体可靠性要求更高。
成本也是激光雷达绕不开的话题,虽然现阶段激光雷达成本仍然偏高,不过如果从汽车零部件的发展角度看,像ABS等产品一开始也贵,但随着产业的发展价格逐渐降了下来,激光雷达也会延续这一进程。同时固态雷达的发展,不同场景雷达配置的合理选择,都会让应用成本逐渐降低。11月13日,《中国汽车报》与广州智能网联汽车示范区运营中心联合推出的“2020智能网联汽车精品课”继续开讲,RoboSense(速腾聚创)项目总监王潇博士分享了“V2X政策发展与产业落地;激光雷达在V2X应用中的核心价值体现;V2X典型应用中激光雷达如何发挥关键作用;激光雷达V2X应用案例剖析”等内容。
■政策加持,V2X有望快速发展
V2X是车与车、车与人、车与交通设施进行信息交换的一种技术,目的是避免不必要的交通事故发生,最终目标是支持自动驾驶的实现。V2X主要包括交通设施联网、车联网、城市大脑(云计算)以及网络通路四个环节,是一场涉足多个行业的大变革。在智能汽车感知受限的情况下,V2X可以超越单车的感知范围,提升智慧交通体系的安全性和效率。
目前V2X主要有两种技术路线,一种是中国倡导的基于蜂窝网络的C-V2X,另一种是美国已摸索多年的DSRC(专用短距离通信技术)。随着5G技术的发展和我国政策的强力支持,C-V2X逐渐显现出后发优势。
从2019年开始,国家发改委、工信部等部委密集发布促进交通强国建设、智能汽车创新发展、推动车联网部署、加快新一代信息基础设施建设、推动5G加快发展等方面的政策,强力支持我国加快智能交通系统和智慧城市建设、增强并落实新一代车用无线通信网络覆盖、车联网部署应用、V2X规模部署及新标准研发验证等工作。在政策和产业多重驱动下,V2X系统快速落地,并在全国多个智能网联示范区和智慧公路车路协同示范区得到应用和验证。
■激光雷达是V2X中最具爆发力的传感器

无论是车端还是路端,激光雷达都是V2X系统中最具爆发力的传感器。激光雷达是一种利用红外激光来测距的主动传感器,可以基本无视外界环境的变化。与传统的感知单元摄像头和毫米波雷达相比,激光雷达具有探测距离远、精度高、光线环境适应性好等优点。无论在车端还是路端,激光雷达都是智慧交通的重要组成部分,由于它的存在,车端和路端感知信息获得了更多的冗余。
在路端,激光雷达可以架设在较高位置监测,以上帝视角监测道路环境。激光雷达硬件可覆盖车路协同全场景需求,具体应用看实际要求,如在分布十车道的路口这类复杂区域需高线数雷达,而相对较小的区域可选择低线数雷达,以期在复杂多变的交通场景中获得最高性价比方案。
获取目标高精度三维信息是激光雷达的特有优势,激光雷达在V2X的主要功能有三个方面:目标检测、目标识别和目标跟踪。其中目标检测确认有无目标,可以得到目标三维位置、目标三维尺寸、目标朝向等信息;目标识别是获取目标类型信息,可以区分大车、小型车还是自行车、行人、障碍物等,但激光雷达还没有细腻到可以区分车牌这类更细小的目标;目标跟踪通过连续帧数据信息,对同一目标的所有数据进行关联处理,可以获得目标速度、方向、加速度、历史轨迹等信息。
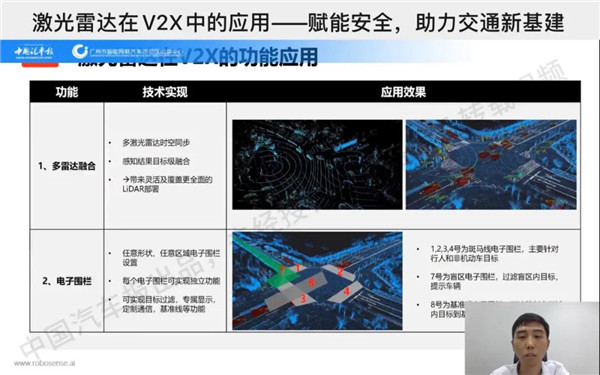
除此之外,激光雷达还可进行多雷达融合和电子围栏管控。多雷达融合在场景规模大,单一雷达无法完全覆盖时,通过时空同步等技术对雷达数据进行目标级融合,提升了感知覆盖面积,同时多雷达还能对彼此盲区进行补充;电子围栏可以进行任意形状、任意区域的设置,在某些需要更精细化操作的子区域,如斑马线位置,可通过电子围栏对该区域进行框选,独立实现一些特定功能,如目标过滤、专属显示、定制通信等。
■激光雷达在车路协同中的两大应用场景

在目前的激光雷达V2X应用中,有两个典型的场景,交叉路口和高速公路。交叉路口是城市交通一个非常重要区域,目前存在的主要问题有:车辆违章行为频发,且易造成交通拥堵;复杂路况和盲区易造成严重交通事故。对此可通过V2X加以改善,通过加装路测感知设备如激光雷达等,得到全维度路口信息还原,进行行人、车辆感知识别,实时监测违章现象并发出碰撞预警,减少事故发生率,同时信息还原对科研部门也很有帮助,可以让他们有针对性地开展交通拥堵治理研究。
由此可见,含有激光雷达的路侧多元融合数据下的交叉路口全域全息感知技术可提高行人和行车安全及交通通行的高效性,该技术提供全天候、全方位的交通参与者识别与跟踪。而整体车路协同技术共同构建智慧交通体系,助力新一代智能网联汽车应用落地。
实践中,基于激光雷达下的交叉路口车路协同技术应用场景主要有:人车安全预警——实时感知行人及车辆位置,将信息传递至决策大脑计算交通事故风险,从而发出安全预警;交通违章检测——监控及检测车辆或行人违反交通规则事件,记录并上传至服务器端;车流量统计——车头时距、车流密度、平均速度、转向比、占有率等交通信息检测;交通综合监控和指挥管理——监控交通繁忙的交叉路口,基于车流量动态大数据,实现交通缓堵方案,诱导分流,提高交通通行效率。
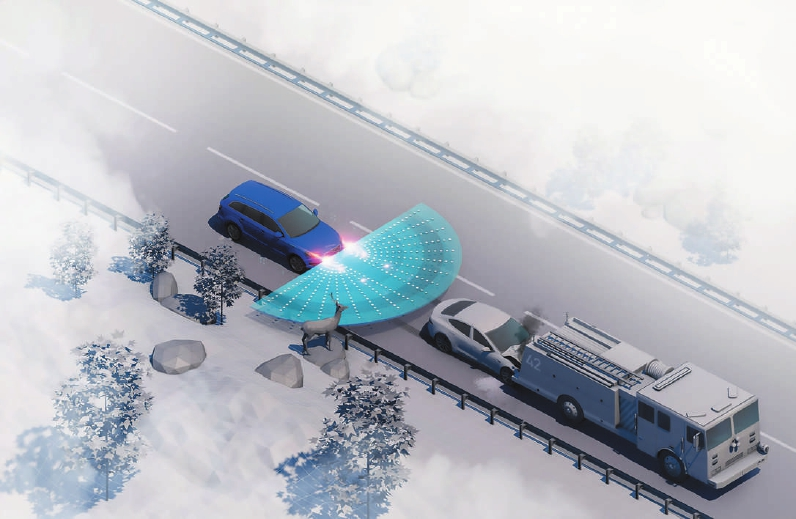
高速路是另一个典型应用场景,主要问题有车辆套牌,ETC逃费等。另外高速路上虽然交通事故率较低,但一旦出事后果严重。应对方案是在事故多发地、收费闸口等重点区域增设路侧设施(如激光雷达、摄像头),进行碰撞预警,减少事故发生率;提高车辆识别分类,防止逃费、套牌现象发生;为司机提供超视距感知,减少事故概率和二次事故。在路测设施中,激光雷达可以发挥重要作用,有效提高整体系统的工作效率。如可以弥补摄像头的漏检率,对路面泼洒物有很好的识别等。
基于激光雷达下的高速公路车路协同技术应用场景包括:触发抓拍——激光雷达实时检测,辅助高速公路ETC触发摄像头抓拍系统,提高车辆捕获率;车辆信息检测——车辆轮廓(类型)及动态信息检测,提高高速路况实时动态监控;异常事件预警——高速公路实现全息覆盖,对高速异物闯入、交通事故等异常事件做预警;交通监控和管理——对汇流隧道桥梁等特殊路段实时监控,通行指引,诱导分流,减少交通拥堵及安全事故。
编辑:黄霞

|

|

|

|